社科在线
社科在线电子科技大学自动化学院教授 彭杰钢
人类认识世界,本质上是在与环境交换信息。摄像头依靠光,雷达依靠电磁波,声呐依靠声波,医学影像则通过不同物理信号揭示人体内部结构。每一种探测技术,都是人类打开自然世界的一扇窗口。
然而,窗口也有边界。在浑浊水体中,光线容易散射,光学成像如同隔着迷雾看世界;在复杂浅水、狭窄空间和强噪声环境中,声波会发生多径反射,回波信息变得混乱;在柔性材料、生物组织和复杂界面中,微小的接触、形变和介质状态变化,更是常规方法不易捕捉的细节。
有没有一种更加局部、低扰动,并且对介质变化十分敏感的感知方式?大自然早已给出了启发。
主动电场探测像是点亮一盏“看不见的手电筒”
在南美洲和非洲的一些河流中,生活着一类特殊的鱼类——弱电鱼。它们不会像电鳗那样释放强电攻击猎物,而是持续产生微弱电信号,在身体周围形成一个主动电场。当附近出现石块、水草、猎物或同类时,这个电场会发生细微变化。弱电鱼通过体表的电感受器捕捉这些变化,从而判断周围目标的位置、大小、形状和材料差异。即使在黑暗、浑浊的水中,它们也能够像“看见”一样感知周围世界。
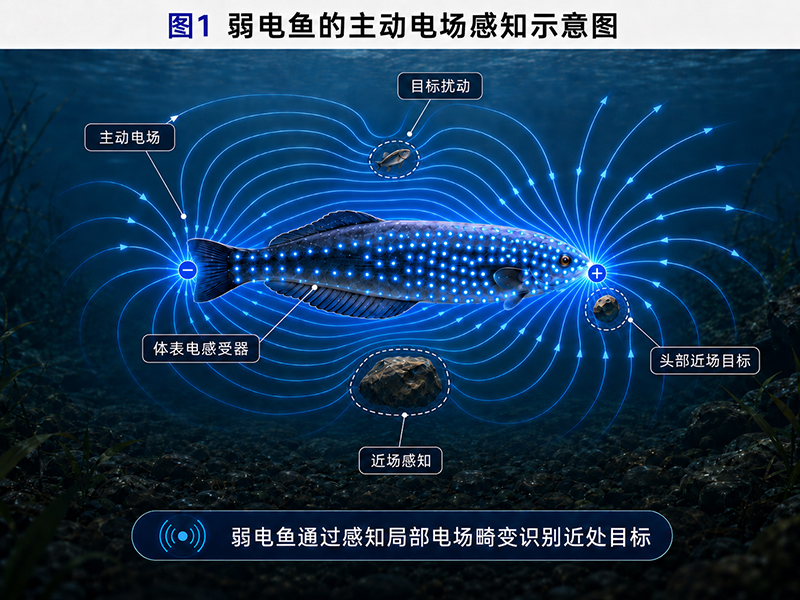
仿生主动电场探测,正是从弱电鱼的这种能力中得到启发。所谓“主动”,是指系统不是被动等待外界信号,而是主动向周围环境施加一个微弱、可控的电场;所谓“探测”,则是通过测量电场被目标或介质扰动后的变化,推断外界信息。形象地说,它像是在环境中点亮了一盏“看不见的手电筒”。虽然人眼看不到光亮,但传感器可以感知电场的弯曲、增强、减弱和相位变化,从而获取目标和介质的信息。
主动电场探测的优势在“靠近后看得更细”
不过,主动电场探测首先必须尊重一个基本物理规律:电场在导电介质中衰减很快。水体中含有大量离子,具有一定电导率。当微弱电场施加到水中后,电流会在水体中扩散,电势和电场强度会随着距离迅速减小。目标距离稍远时,它引起的扰动信号可能已经非常微弱,并容易被环境噪声、水体电导率变化、背景扰动和测量不稳定性所掩盖。
因此,主动电场探测并不天然适合承担远距离搜索任务。它的优势不在于“看得很远”,而在于“靠近后看得更细”。弱电鱼的电感知也不是一种远距离扫描机制,而是在身体周围形成有限范围的局部感知空间,用来识别近处目标、障碍物和环境变化以及目标介质电学特性。从物理角度看,主动电场更适合近距离、低扰动、强交互,多参数(距离、大小、材料特性等)和高灵敏的感知任务。
更重要的是,主动电场的水下距离扩展并不是简单“加大发射功率”就能解决的问题。若要强行扩大探测范围,往往需要更强的激励能力、更大的等效场源、更高灵敏度的检测系统和更复杂的传感结构。这会带来功耗增加、系统体积增大、结构复杂化和稳定性下降等问题。同时,检测系统越灵敏,也越容易受到环境电磁噪声、水体电导率波动、运动扰动和电极界面效应的影响。
更关键的是,这种距离扩展的收益往往十分有限。由于水中主动电场本身具有较强的空间衰减特征,目标距离稍远后,真正携带目标信息的扰动信号会迅速减弱。系统代价可能显著增加,但有效探测范围未必获得相应提升。过强的激励还可能带来能耗、安全性、环境扰动和自身隐蔽性下降等问题。因此,主动电场探测不宜简单走“更大功率、更远距离”的技术路线。
这一认识非常关键。它意味着主动电场探测的发展方向,不应被理解为不断拉长水下探测距离,而应回到它最适合发挥作用的物理场景:近场、界面、接触和局部介质响应。在这些场景中,电场的快速衰减不只是限制,也可能成为优势。由于作用范围局部,主动电场能够在较低能量下与周围介质发生可控相互作用,并对附近目标的电学差异、形状变化和界面状态产生敏感响应。
主动电场探测的意义并不局限于水下
在水下环境中,这种能力有望为水下机器人提供新的近场感知方式。当机器人靠近目标、贴近海底、穿越狭窄通道或执行精细操作时,仅仅依靠远距离探测是不够的,还需要对近处环境进行更加细致的判断。主动电场探测可以作为声呐、视觉和惯性导航之外的补充手段,为水下装备提供一种低扰动、局部化、对近场目标敏感的感知思路。它的价值不在于替代远距离探测技术,而在于补足现有技术在近场、界面和局部介质响应感知方面的不足。
如果进一步放宽视野,就会发现主动电场探测的意义并不局限于水下。只要某种介质能够传导或响应微弱电场,并且目标、接触或状态变化能够改变局部电场分布,就可能形成主动电场感知的应用空间。由此,仿生主动电场正在从水下液态环境,逐步走向固态传感器和湿态生理信息感知等更广阔的前沿方向。
在固态传感器中,这种拓展具有自然的物理基础。导电橡胶、柔性凝胶、复合材料和智能皮肤等介质,虽然不同于水体,但也可能表现出一定的导电性、极化特性和电场响应。当外界发生接触、压缩、弯曲或形变时,材料内部的局部电场分布会随之改变。此时,主动电场的局部性有助于突出接触区域和界面扰动,使传感器对位置、压力、形变和材料差异更加敏感。
从这一角度看,固态仿生主动电场传感器并不是简单把水下电感知“搬到陆地上”,而是把主动电场的近场物理特性转化为触觉感知能力。传统触觉传感器多关注压力、电阻、电容或压电信号,主要回答“是否接触”和“压力多大”等问题。而主动电场传感更关注电场如何在材料内部传播,如何被接触对象扰动,以及这种扰动如何反映接触位置、局部形变和材料属性。未来,这类思想有望为机器人电子皮肤、智能夹持器、假肢触觉反馈、柔性可穿戴设备和人机交互系统提供新的感知途径。
类似的物理逻辑也可以延伸到湿态生理信息感知中。人体组织、细胞、血液和体液中含有大量离子和带电结构,本质上属于复杂的湿态导电与极化介质。在这样的环境中,电场同样不适合长距离传播,但它可以与局部组织结构、细胞状态、界面极化和离子分布发生敏感耦合。因此,湿态生理信息感知并不是追求远距离探测,而是关注微弱电场与局部生物组织之间的相互作用。
这种思路为生物组织状态评估、离体样本分析、创面恢复监测和生理变化感知提供了新的观察角度。需要强调的是,主动电场并不是要直接替代现有医学诊断,也不能简单宣称能够判断某种疾病。它更可能作为一种辅助信息来源,关注组织在微弱电场作用下表现出的导电性、极化特性和频率响应。换句话说,它不是单纯“看颜色”或“看形状”,而是尝试理解湿态组织对电场的回应。
主动电场探测有望成为一项前沿研究方向
从水下环境、固态材料到湿态生理组织,表面上看差异很大,但背后存在一些相通的科学问题:电场如何在复杂介质中传播和衰减?不同界面如何改变局部电场分布?材料或组织的导电性、极化特性和结构差异如何反映在电响应中?微弱信号如何被稳定采集和可靠解释?这些问题共同构成了仿生主动电场探测从单一水下技术走向跨介质智能感知的科学基础。
这也正是主动电场探测值得持续研究的原因。它不是某一种单一设备,也不是某一个孤立应用,而是一类具有跨介质潜力的主动感知思想。它关注的不是被动接收信号,而是通过微弱、可控、安全的物理交互来理解环境;它追求的不是远距离搜索,而是近场、界面、接触和局部状态变化;它面对的不是单一物理量,而是复杂介质中的电响应、结构变化和信息表征之间的深层关系。
当然,这一方向仍处在发展过程中,距离广泛应用还有不少问题需要解决。在水下环境中,电场衰减快,远距离探测能力有限;强行扩展探测距离会带来较大的系统代价,而实际收益可能有限。在固态传感中,压力、形变和材料电学性质可能相互耦合;在湿态生理信息感知中,生物组织差异复杂,个体差异明显,更需要严谨实验和规范评价。此外,弱信号采集、噪声抑制、物理模型建立和智能信息解析,都是主动电场探测走向实际应用必须面对的挑战。
科学进步往往不是制造一件解决所有问题的“万能工具”,而是为人类打开新的观察窗口。仿生主动电场探测的价值,也不在于取代声呐、视觉、超声或医学影像,而在于提供一种更加接近自然智慧的近场感知方式。它让机器不只是被动接收外界信息,而是主动与环境发生微弱、可控而安全的相互作用,并从这种相互作用中理解周围世界。
从弱电鱼在浑浊河流中的“电感知”,到水下机器人近场探测,再到固态柔性传感和湿态生理信息感知,仿生主动电场探测展示了生命智慧与现代科技结合的广阔前景。未来,随着智能传感器、人工智能和生物医学工程的发展,主动电场探测有望从水下近场感知走向跨介质智能感知,成为连接自然、机器与生命健康的一项前沿研究方向。
作者简介:彭杰钢,电子科技大学自动化工程学院教授,国际先进材料学会(IAAM)会士。长期致力于水中主动电场仿生传感与水下机器人传感器系统等交叉前沿领域的研究。曾主持国家自然科学基金面上项目、国家重点研发计划课题等。兼任中国图象图形学学会视觉检测专业委员会常务委员,主编国家“十二五”规划教材。